

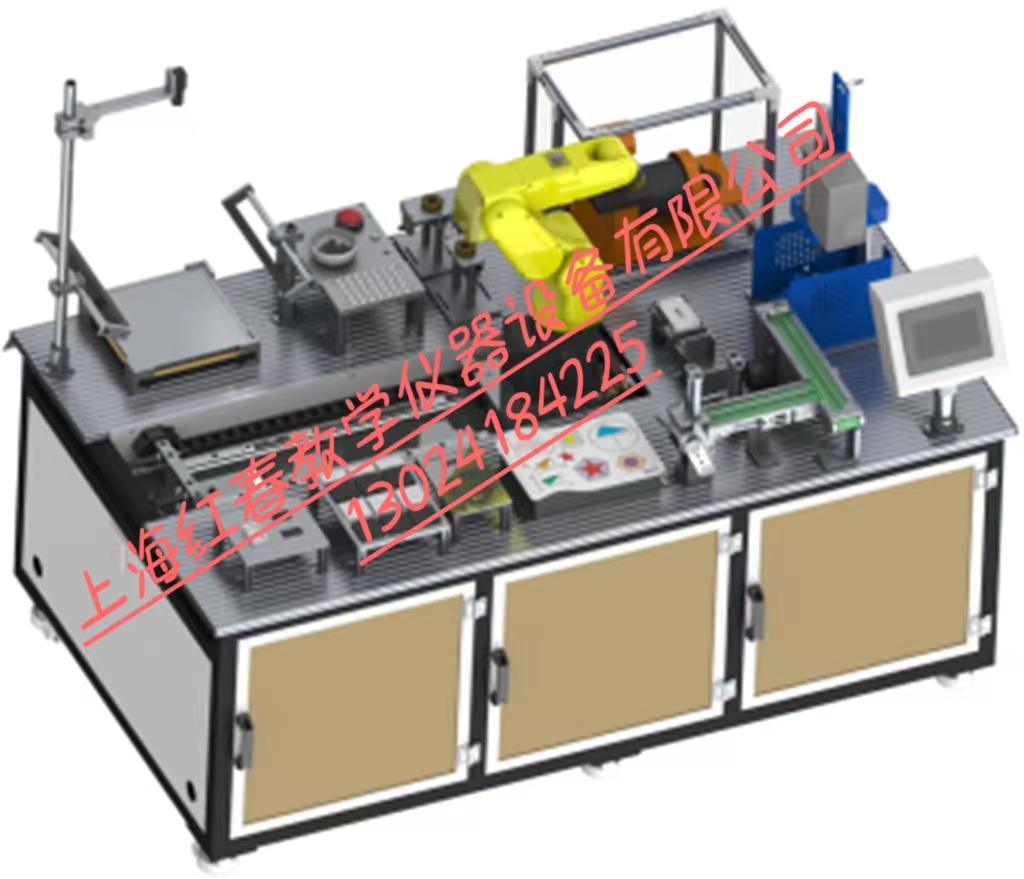
CH-JY-GYJQR-GZ01工业机器人多功能应用及开发工作站
1.1 机器人系统

工业机器人:ABB
控制轴数:6 轴;
1) 有效负载:≥3kg;
2) 工作范围:≥550mm;
3) 本体重量:约 25kg;
4) ▲重复定位精度:0.01 mm;
5) 运动范围要求如下:
轴 1:+165°~-165°
轴 2:+110°~-110°
轴 3:+70°~-90°
轴 4:+160°~-160°
轴 5:+120°~-120°
轴 6:+400°~-400°
6) 最大速度:
轴 1:250°/s
轴 2:250°/s
轴 3:250°/s
轴 4:320°/s
轴 5:320°/s
轴 6:420°/s
7) 提供 ABB 机器人配套的控制器、示教器
8) 提供 ABB 配套的仿真软件
1.2 实训平台
1) 台体为钢制结构,采用优质钢板制作,钢板厚度不低于1.2mm,表面喷涂处理;
2) 台面为型材结构,可任意安装机器人或其它执行机构;
3) 配套钢制网孔电气安装板,钢板厚1.5mm,可用于安装控制器件与电源电路;
4) 实训台自带1套操作面板,分别为“启动”、“停止”、“复位”、“上电”等按钮和指示灯,并且带一个急停按钮,电源控制电路1套,PLC 1台,实训台并能够方便移动与定位;
外形尺寸约2000mm*1100mm*780mm (L×W×H)(可根据功能设计及美观进行调整)。
5)包括西门子 PLC(S7-200Smart 系列或者 S7-1200 系列控制器件与电源电路以及相关控制系统。
6)提供相关配套设备如气泵等。
7)包含绿色制造安全监测装置:单回路剩余电流、4路温度测量、保护功能;三相全电量测量,电压、电流、功率;4DI+2DO开关量输入、输出功能; 无线通讯功能,内置无线模组,SIM接口,网络协议:TCP/UDP/LWM2M/COAP;1路RS485通讯接口,支持MODBUS-RTU规约;电压输入:0~400V,电流输入:0~6A辅助电源:AC220V;剩余电流:精度1级,报警设定值:100~1000mA,动作延时时间:0.1s~30s;安装方式:导轨式安装;装置具有消防产品认证证书。
实训平台
1.3 送料机构模型
由两个井式送料机构和输送皮带机构组成,可实现工件自动送料和自动定向送料编程练习,具有自行判断料仓是否有料。
1.4 物料分拣任务模型
由分拣输送皮带机构、交流电机、变频器、光纤传感器和分拣物料块等组成。可实现皮带正反转进行两种颜色以上PP材料物料块的循环分拣,且物料具有定位功能,便于机器人后续操作。
1.5 抛光打磨任务模型
由砂轮砂带机与打磨工件组成,采用砂带机固定运转,机器人拿取工件进行打磨作业。
1.6 零件码垛模型
由铝材加工氧化的物料摆放底板和码垛底板固定到实训平台;根据要求物料块被摆放到摆放底板上,机器人通过吸盘夹具按要求拾取物料块进行码垛任务;码垛形状由操作者自己设计组合方式;练习对机器人码垛、阵列的理解并快速编程示教的应用技能。物料块有长方形、大正方形和三角形等。
1.7 轨迹描绘任务模型
由不锈钢加工制造,平面、曲面上有不同图形规则的图案(直线、圆形、三角形、五角星螺旋形等线条),以笔形绘图夹具描绘图形,训练对机器人基本的点示教,直线、曲线运动轨迹及工件坐标系的掌握。
1.8 多功能吸盘夹具
由铝材加工氧化处理,配备1组高真空吸盘及真空发生器,保证足够的吸力;设计简洁,能夠快速配合机器人拾取小型物料,避免干涉,配合机器人完成分拣任务训练。
1.9 绘图笔夹具
1) 由铝材加工氧化处理,塑料笔杆,安装到机器人上,用于描绘轨迹训练使用,可配油性记号笔,也可安装到夹具上,用于机器人写字创新训练使用。
2) 具有防碰撞等功能,即使操作不当,发生笔杆与其他工件碰撞时,也不会导致机器卡阻,有效降低机器人的故障,同时也降低绘图笔碰撞时的力量,不会导致其他被撞物体的损坏,
1.10 机器视觉五子棋AI综合实践系统
1) 配备机器视觉单元,通过机器视觉对棋盘中的黑白棋子位置拍照,使用halcon等方法将黑白棋子识别,并获取棋子的位置,通过以太网接口将数据传动至控制器,控制器通过AI算法,分析下一步的优选落点,将选择结果通知工业机器人,完成机器人的落子。通过人机对弈,可以决出胜负。
2) 工业相机主要参数:
① 像素:500W
② 传感器类型:cmos
③ 最大分辨率:2592*1944
④ 帧率:15
⑤ 光学尺寸:1/2.5”
⑥ 配套条形光源及光源控制器
1.11机电一体化智能小车
包括下面组成部分:
(1)教学板1块(含芯片AT89C52芯片或者 STM32芯片);
(2) Boe-Bot硬件1套,含外部组件(发光二极管(LED),扬声器,按钮开关,光敏电阻,电阻,电容,红外线LED及接收器等);
(3)专用机械组件;
(4)数字编码器套件;
(5)QTI线跟踪套件;
(6) GazBot红外距离探测传感器;
(7) PING超声波传感器;
(8) 一维传感器安装套件;
(9) 电池;
(10)Robotsoft软件包;
(11)实验指导书1本;
(12)组装工具:螺丝刀,尖嘴钳等。
(13)专用开发软件。
1.12 编程电脑
1) CPU主频3.0Ghz睿频4.7Ghz及以上,≥八核八线程,三级缓存12M及以上,功耗≤65W;
2) 内存 ≥8GB DDR4 2666 UDIMM;
3) 硬盘 ≥256GB SSD M.2 2280 NVMe TLC
4) M.2支架 M.2 HDD Bracket Kit;
5) 显卡 集成显卡;
6) 声卡 集成声卡;
7) 电源:≥180W
8) 网卡 集成RJ45千兆网卡;
9) 键盘 配套原厂键盘;
10) 鼠标 配套原厂鼠标;
二、基本实验、实训项目
工业机器人的基本认识;
工业机器人本体与控制器的安装接线;
工业机器人示教器运动操作;
工业机器人的点位示教;
工业机器人基本参数设置;
工业机器人基本运动指示学习;
工业机器人基于示教器的程序编辑;
工业机器人初始化与参数恢复;
工业机器人基本接线方法;
工业机器人与 PLC 的 IO 通讯;
工业机器人 IO 控制实训;
简单轨迹运行编程与示教;
平面描图任务编程与示教;
曲面描图任务编程与示教;
平面矩阵立体码垛编程与示教;
工业机器人与吸盘夹具配合与应用;
工业机器人抛光打磨应用编程与调试;
工业机器人物料分拣应用编程与调试;
机器视觉 HALCON 编程训练;
机器视觉与工业机器人通信编程调试;
五子棋人机对弈实验
工业机器人的离线仿真实验一
工业机器人的离线仿真实验二
工业机器人的离线仿真实验三
工业机器人的离线仿真实验四
工业机器人的离线仿真实验五
智能小车沿线行走控制实验
智能小车走迷宫控制实验
智能小车跟随光源控制实验
智能小车距离检测控制实验
三、基本用途
1. 面向《机器人学》、《机器人原理及其应用》、《智能制造技术》、《智能科学与技术》、《工业智能感知技术》、《智能制造控制技术》等课程的实践教学。
2. 为相关专业学生课程设计、毕业设计及课外创新设计、实训提供条件。
3. 为教师和学生从事机器人高级应用与研发提供实验平台 。
4. 改善办学条件,提高学校或院系知名度。
四.其它
设备尺寸(长*宽*高):193cm*120cm*160cm;约重500KG。
供电电源:220AV, 50HZ






 在线客服1号
在线客服1号